
روش های کنترل ارتعاشات در سازه ها
مقدمه : مفهوم کنترل ارتعاش در سازه ها :
کنترل فرآیندی است که در طی آن با دستکاری کردن پارامترای موثر یک سیستم دینامیکی ، به عملکردی مطلوب از آن سیستم نائل میشویم.
تفکر کنترل ارتعاش ورودی به سازه و پاسخ آن، تغییرات اساسی را در روند معمول مقاوم سازی سازه ها دربرابر زلزله ایجاد کرده است. در این تفکر به جای مقاوم سازی سازه به عنوان تنها راه، وسایل و امکانات جنبی نصب می شوند تا همراه با سازه و به صورت یک مجموعه در برابر زلزله مقاومت کنند. این وسایل و امکانات با رفتار خاص خود باعث بهبود پاسخ سازه به هنگام زمین لرزه می شوند[1]
به طور کلی اعمال هر گونه نیرو به سازه سبب ایجاد ارتعاش در آن میگردد. نیروی وارده به سازه می تواند منشاء داخلی یا خارجی داشته باشد . وجود یک دستگاه مرتعش در داخل سازه به نحوی که تکیه گاه این دستگاه به یک عضو سازه نیرو وارد کند، می تواند سبب ارتعاش موضعی یا کلی سازه گردد. نیرویی نظیر باد منشاء خارجی داشته و به طور مستقیم بر سازه وارد می گردد و از طرف دیگر، نیروهایی نظیر زلزله یا اثر ترافیک خارج ساختمان، ارتعاش را از طریق زمین به پایه ی سازه منتقل کرده و انرژی ارتعاش از شالوده سازه به سایر طبقات انتقال می یابد، که به این حالت تحریک پایه گفته می شود[2].
امروزه کنترل ارتعاش در سازه به کمک سیستم های مستهلک کننده انرژی صورت میگیرد. این امر به کاهش پاسخ تغییر مکان یا شتاب سازه در برابر بارهای جانبی زلزله منجر می شود. مطالعه این وسایل باعث ایجاد فلسفه طراحی جدیدی می شود که روی افزایش ظرفیت استهلاک انرژی در سازه تاکید دارد و سازه به جای مقاومت در برابر زلزله، در مقابل آن کنترل میشود[3].
تکنیک های کنترل ارتعاشات سازه بر اساس نحوه ی عملکرد سیستم
تکنیک های کنترل ارتعاشات سازه بر اساس نحوه ی عملکرد سیستم به دو دسته تقسیم میشوند:
1- روش های کنترل فعال
کنترل فعال یکی از سیستم هایی است که به صورت هوشمند جهت مقابله با نیروی جانبی فعالیت می کند. در سیستم های کنترل فعال، فرض بر استفاده از یک منبع خارجی برای افزایش راندمان کنترل و کاهش ارتعاشات سازه می باشد[4].
سیستم های کنترل فعال را می توان به صورت عمده به دو بخش تعیین مکانیزم اعمال نیرو بر سازه و نیز الگوریتم های محاسبه ی نیروی کنترل، تقسیم نمود. در این گونه سیستم ها ضمن تعیین پاسخ سازه که می تواند شامل شتاب، سرعت و یا تغییر مکان باشد، در هر لحظه و با استفاده از یک الگوریتم مشخص، نیروی کنترل مورد نیاز تعیین می گردد. سپس با استفاده از یک منبع خارجی نسبت به اعمال نیروهای محاسبه شده ، کنترلی بر سازه صورت میگیرد و این کار تا زمان کاهش پاسخ سازه به حد مورد نظر ادامه می یابد[5].
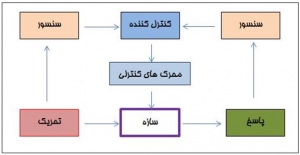
به بیان ساده می توان سیستم کنترل فعال را به سه جزء زیر تقسیم کرد:
1) حسگرهایی که در سازه قرار گرفته اند تا مقدار و شدت نیرو ی خارجی یا پاسخ سازه یا هر دو را اندازه بگیرند.
2) ابزارهایی که مقادیر اندازه گرفته شده را پردازش کرده و از آن مقدار نیروی کنترل مورد نیاز را به دست می آورند.
3) عملکردهایی که معمولا توسط منابع انرژی خارجی تغذیه می شوند و نیروی مورد نیاز را تامین می کنند.
شمای کلی از استراتژی کنترل فعال سازه در شکل1، مشاهده می شود.
2- روش های کنترل غیر فعال
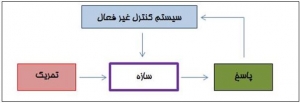
سیستم های کنترلی غیرفعال در سازه، باعث افزایش میرایی در سازه می شوند و پاسخ سازه را تحت ارتعاشات خارجی کنترل می کنند. در سیستم های کنترل غیر فعال نیازی به منبع خارجی نیست و فعال شدن آن ها به حرکت سازه وابسته است. این سیستم ها در برابر تغییرات شرایط بارگذاری و پاسخ سازه عملکرد متفاوتی از خود نشان نمی دهند[6].
در اینگونه روش ها، عامل کنترل کننده ارتعاش در محل مناسبی از سازه قرار میگیرد و عملا تا قبل از تحریک سازه، به صورت غیر فعال است. با شروع تحریک ( مثلا زلزله )، سیستم کنترلی به کار افتاده و عملکرد کنترلی ( اعم از تغییر سختی، پریود، میرایی یا جرم ) را در حین تحریک انجام میدهد و پس از خاتمه تحریک، مجددا به حالت غیر فعال بازمیگردد که به دلیل جذب بخشی از انرژی ورودی به سازه، احتمال روئیت خرابی جزئی یا کلی در آن وجود دارد. جداسازی پایه و استفاده از میراگرهای انرژی، از جمله روش های کنترل غیر فعال می باشند[7]. در شکل 2، شمای کلی از سیستم کنترل غیر فعال نشان داده شده است.
3- روش های کنترل نیمه فعال
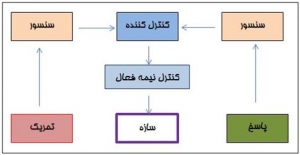
روش کنترل نیمه فعال در واقع از اصلاح سیستم فعال حاصل میشود. در این روش سیستم اجازه میدهد که خواص مکانیکی سازه بر اساس بازخورد تحریک خارجی زلزله یا پاسخ اندازه گیری شده سازه ، تنظیم و اصلاح شود.
به بیان دیگر سیستم کنترل نیمه فعال ، با اضافه کردن چند دستگاه ساده به بادبند یا دیوارهای سازه ایی ساخته میشود.این دستگاه ها که سازه را با سختی و میرایی متغیر برای کاهش پاسخ لرزه ایی در مقابل زلزله آماده می کنند، در مقابل زلزله های متوسط و باد مانند سیستم غیر فعال به عنوان مستهلک کننده انرزی، و در مقابل زلزله های غیر منتظره و قوی با صرف یک نیروی بسیار کوچک مانند کنترل فعال عمل می کنند. کنترل نیمه فعال در مقایسه با کنترل فعال بسیار قابل اعتماد تر و ساده تر بوده و برای کاهش پاسخ سازه بسیار موثر تر از سیستم کنترل غیر فعال است[8]. در شکل3، شمای کلی از سیستم کنترل نیمه فعال نشان داده شده است.
سیستم های نیمه فعال دارای سه ویژگی مهم هستند[10]:
- نیاز به نیرو و یا انرژی زیادی برای اثر گذاری مناسب بر سازه ندارند.
- سیستم های نیمه فعال باعث استهلاک انرژی میشوند، اما انرژی به سیستم اضافه نمی کنند و در نتیجه پایداری سیستم را ضمانت می کنند.
- در مقایسه با سیستم های غیر فعال ، این سیستم توانایی بهتری در کاهش پاسخ ساختمان در اثر تحریکات طبیعی دارد.
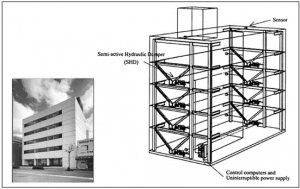
اولین بار پیاده سازی این سیستم در مقیاس بزرگ، در ساختمان کاجیما شیزوکا در ژاپن4، صورت گرفت . در این ساختمان از دمپرهای هیدرولیکی نیمه فعال (که به اختصار SHD (Semi-active Hydraulic Damper)نامیده میشوند) استفاده شده است[9].
4- روش های کنترل ترکیبی (هیبرید)
این روش هر دو سیستم کنترل فعال و غیر فعال را به صورت همزمان در بر میگیرد.به این صورت که در ابتدای تحریک، کاهش ارتعاشات توسط یک سیستم غیر فعال صورت گرفته و پس از دفع تاخیر زمانی ، سیستم فعال نیز وارد عمل می شود.
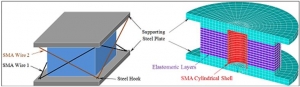
در اینجا سیستم غیر فعال ممکن است به فعالیت ادامه داده و یا در صورت عدم نیاز به آن، از دور خارج شود[5]. به عنوان مثال کاربرد ترکیبی جداسازهای لاستیکی و کابل های SMA (کابل های شکل پذیر، Shape Memory Alloys) که در شکل 5 دیده می شود، نوعی از سیستم کنترل ترکیبی به شمار می آید[30].
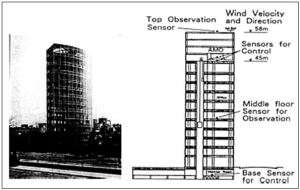
ساختمان سنداگایا (Sendagaya)در ژاپن نمونه ایی دیگر از به کار گیری سیستم ترکیبی می باشد(شکل 6). در این ساختمان از سیستم میراگر جرمی ترکیبی ( که به اختصار HMD(Hybrid Mass damper) نامیده میشود ) استفاده شده است. این سیستم ترکیبی از میراگر جرمی میزان شده و لوازم کنترل فعال می باشد[9].
مراجع :
- سلیمان پور، ر.، یحیایی،م. و برقی، م.، (1385)، “مقاوم سازی ساختمان های فلزی موجود با میراگرهای ADAS”، نشریه فنی مهندسی مدرس، شماره 25، صفحه 98-89.
- اکبر پورنیک قلب، ع.، ادیب، م، ض. و عسگری،م.، (1389)، “مدلسازی رفتار دینامیکی سازه های فولادی جداسازی شده نا متقارن با سیستم مهاربند جانبی تحت تحریکات چند مولفه ای زلزله”، همایش ملی مهندسی عمران و توسعه پایدار، استهبان، دانشگاه آزاد اسلامی واحد استهبان.
- زهرائی،س،م.، صادق آذر، م،. و زینالی،ر.، (1390)،” بررسی عملکرد سه روش کنترل غیر فعال در بهبود پاسخ لرزه ای قاب های خمشی فولادی”، نشریه مهندسی عمران و نقشه برداری، دانشکده فنی دانشگاه تهران، دوره 45، شماره 4، صفحه 436-429.
- دهقانی، ح. و محبی نوذر، آ.، (1383)، “کنترل پاسخ لرزه ای سازه ها با استفاده از میراگر جرم هماهنگ شده”، یازدهمین کنفرانس دانشجویی مهندسی عمران، بندر عباس، دانشگاه هرمزگان.
- اخوت، ه.، امیرخانی، آ.، زرکش، آ. و پورجعفر، م.، (1387)،” معرفی روش های نوین در کنترل ارتعاشات ساختمان های بلند“، نشریه معماری و ساختمان، شماره 16، صفحه 141- 136.
- شریعتمدار، ه. و محسنی،س. (1392)، “بررسی تغییر مکان نسبی سازه جداسازی شده با جرم تنظیم شده چندگانه در ارتفاع سازه تحت اثر زلزله های میدان نزدیک”، هفتمین کنگره ملی مهندسی عمران، زاهدان، دانشکده مهندسی شهید نیکبخت.
- Yang, J.A., Danielians, A. and Liu, S.C. (1991), Aseismic Hybrid control systems for building structure, J.Eng.Mech.,vol 117, pp.836-835.
- امینی، ف. و ویسی،خ.، (1387)،” بهینه سازی محل میراگرهای نیمه فعال در بهسازی لرزه ای سازه ها”، اولین کنفرانس بین المللی مقاوم سازی لرزه ای، تبریز،ایران.
- Shanmuga priya,d,Cinitha,A, Umesha, P, Nagesh,R (2014), “Enhancing the Seismic Response of Buildings with Energy Dissipation Methods – An Overview“, Journal of Civil Engineering Research, vol, 4(2A), pp.17-22
- Performance of isolation bearings comprised of CFRP composite plates and natural rubber, Alam research group,viewed 10 February 2018,
< https://people.ok.ubc.ca/shahria/index_files/Page1369.htm>








